NEO VORTEX Shaft Runout Issue

Since we launched the NEO Vortex and SPARK Flex, we have received reports and seen through our internal verification that motors have significant runout (~.04in). We have done an extensive investigation and have found the root cause to be a combination of tolerance stackup with some out of spec parts.
In engineering, “runout” refers to a rotation that is not exactly in line with the primary axis, leading to a slight wobble or eccentric shape while rotating. The largest contributor of this runout is the shaft itself. This is due to the hex portion of the shaft not being concentric to the round section of the shaft. In checking across our various types of shafts, the ones with the biggest issue are our 8mm keyed shafts, but there may be shafts of other types that exhibit the similar problem.
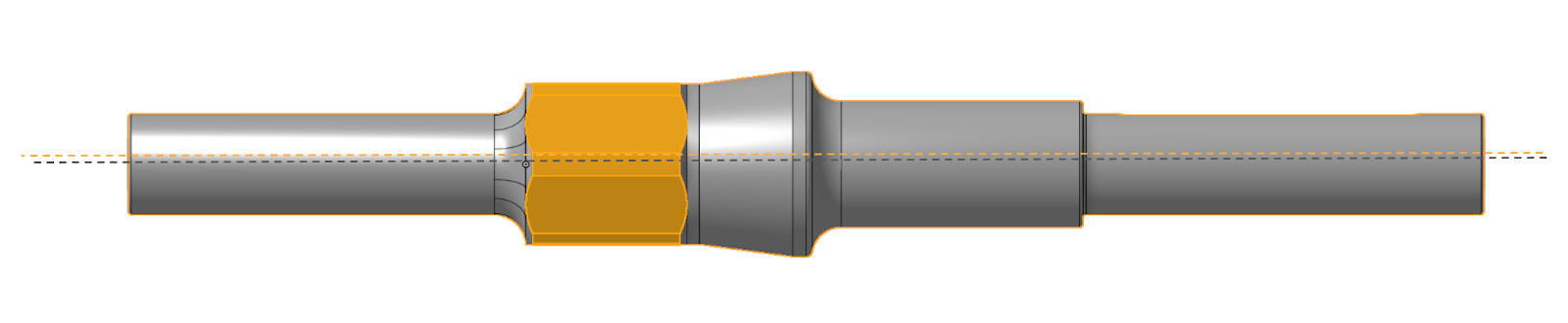
The hex section on this shaft not being concentric causes the shaft to shift in the hole before the taper section bottoms out. This forces the shaft crooked in the hole which is causing the high levels of runout.

In addition to the shafts, the motors themselves also have a variance which can cause the runout to be better or worse. Due to the same issue as the shaft which has caused a slight misalignment between the taper section and hex, the motor itself can force a good shaft out of alignment. This has a much less impact on the runout but it is still a potential cause of runout, due to the bore section of the motor not being manufactured to spec. Based on our sampling, we believe this does not impact every motor, just a small portion of the manufactured batches.

In the worst case, a team could get a motor and shaft that are both out of spec, resulting in a combined runout of ~0.040in Here is a chart with some information about tolerances
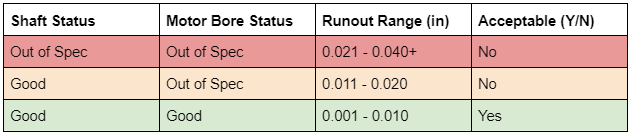
When we started this project our goal was to reach a runout of 0.000 - 0.003in on a shaft when installed in a motor. Due to these shaft and motor issues in our first production batch, REV considers a motor and shaft that have less than 0.010in of runout to be acceptable. We have tested motor/shaft combinations at this limit in a number of different situations including gearboxes, belt runs, and chain runs. In all cases the impact of this runout to robot performance is negligible. With the replacement shafts, in many cases you will see a runout range between 0.002 - 0.007in.
Process for remediation:
Every team that pre-ordered 8mm shafts is automatically getting replacement shafts, 100% of which have been inspected at REV. About 50% of those shafts were already shipped out to teams yesterday and we hope to get the rest of the shafts out to teams today and early next week. Your team will receive an email with the tracking number for the 8mm shaft replacements once shipped. When you receive your new shafts, please discard your old shafts. We don’t need them back, but are trying to avoid them being mixed up later on in your shop as we control our tolerances tighter. When installing the shaft, we suggest rotating the shaft through the 6 positions (aka “clock” the shaft) to find the best runout of the 6 positions. Your new shaft should put you below a 0.010in runout in all 6 positions, however by clocking it in the different hex orientatins, you can find the best orientation to minimize your runout. You may see values like the table below as you clock your shaft, please check all positions and find the best one for your team. If you don’t have any measurement device such as a dial indicator, you should pick the clocking with the least visible shaft runout. Please note that you may not see visible runout below 0.008in.

If you go through this process and you are still seeing large runout numbers we will want to replace your motor as you were one of the unfortunate few to get both an out of spec shaft and motor. Please reach out to support@revrobotics.com. We have plenty of confirmed good motors in stock and will process these requests quickly, sending you the replacement motor with a return label so we can get the out of spec motor back.
In an effort to provide flexibility for our customers, we are also offering returns on any motors, controllers, and shafts, regardless of usage or modifications. If you choose this option, please reach out to support@revrobotics.com with your order information.
Interim remediation: If your team does not want to wait for new shafts to arrive, we have seen success making the hex on the shaft smaller. You can accomplish this with a file and it does not need to be precise. Removing 0.010in from the hex evenly across the faces may give you a shaft that is within acceptable tolerance range. Other shaft notes:
- MAXSwerve shafts: Because the MAXSwerve module has a bearing at the end of the shaft when installed, we are recommending people run these shafts without the back screw. You should have no runout problems in this situation as the shaft is fully captured.
- MAXPlanetary shafts: Because the MAXPlanetary itself captures the shaft cup, we also recommend running these shafts without the back screw. While the runout on these parts has been measured on average of 0.003in, letting the shaft float will ensure no issues during operation.
- Falcon Compatible Spline shafts:In our study of these shafts we found these to be in spec, if you think you have one that is out of spec, please reach out and we will replace it. If you are seeing runout, this could be due to your motor, please reach out.
- 20DP Gear - 7t shafts: In our study of these shafts we found these to be in spec, if you think you have one that is out of spec, please reach out and we will replace it. If you are seeing runout, this could be due to your motor, please reach out.
- Hex shaft: We are seeing on average a runout of about .008in with regular hex shaft. It was always expected that runout was going to be more with hex shaft, we recommend adding bearings to your assemblies if runout control is critical to your robot design.
Public Sales of SPARK Flex and NEO Vortex:
- Due to these issues, REV will be inspecting 100% of the thousands of motors and shafts we have in stock to ensure that any new orders won't exhibit these issues. As a result, we are going to be delaying the opening of our public orders until we have reached sufficient inventory levels to keep up with demand. We are hopeful that we can release public orders for these late next week, the week starting 1/15/2024.
Other notes of importance for SPARK Flex:
- We have published a firmware update on 1/11/2024 (v 24.0.2) please make sure you are running the latest firmware on your devices.
- When pushing the button, please don’t use anything with a sharp point. The point has the ability to wedge between the PCB and button causing it to break off. A small straightened paper clip is our recommendation for pushing the button if you need to do so. We published a guide here about this. If you have damaged your Flex please reach out to us for a replacement.
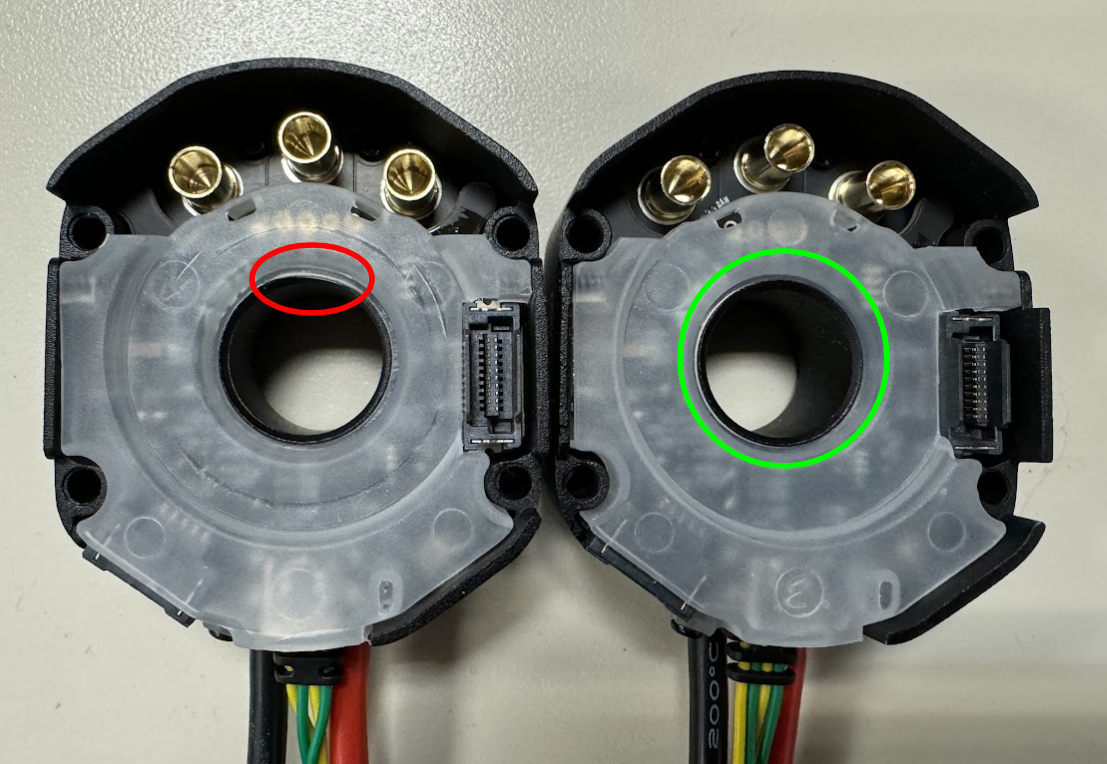
- The plastic cap that covers the electronics on the Flex has not been all the way clipped down on some units. If you don’t click this down, the shaft of the motor may rub on the plastic increasing current draw. There was excess flashing from the molding process that prevented these from fully seating. To reseat this shaft, place the flex flat on a table and, with your thumbs, press down near either side of the hole until you hear a click. You can be sure that these are all the way seated when you can see the black edge of the aluminum all the way around the inner hole like in the photo:
Explore Popular Articles
Ship to Champs 2026
Attending FIRST Championship in Houston, TX?Order by 12pm CST, April 24th for FREE Shipping! Pi...
Introducing New REV ION Products for the 2026 Season
New From REV Robotics: EasySwerve, NEO 2.0, MAXPlanetary Updates, and Intake Solutions We are e...
Uncovering the 2026 FRC #TeamREV Awardees
This season, we explored the artifacts, innovations, and engineering legacies that shape how tea...
A Note About Price Changes at REV
By Greg Needel, CEO of REV Robotics I wanted to take a moment to talk openly about something that i...
Unearthing the 2025-26 FTC #TeamREV Awardees
This season, we dusted off maps, followed clues, and pieced together an extraordinary story from...
Team REV Sponsorship Applications Now Open!
Get ready to dig deeper, build bolder, and engineer a legacy with Team REV! REV Robotics is thrille...